|
I am a first-year PhD student in the Autonomous Systems Lab at Stanford University, advised by Prof. Marco Pavone. I also work closely with Yuejiang Liu and Prof. Chelsea Finn.
I previously worked with Mengdi Xu and Ding Zhao at Carnegie Mellon University, and Mo Chen at Simon Fraser University.
Email / Google Scholar / Github / X(Twitter) |

|
News
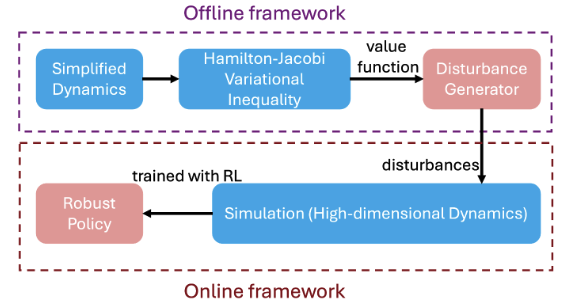
| 2025/01 - Our paper about Learning Robust Policies via Hamilton-Jacobi Reachability-guided Disturbances got accepted by ICRA 2025, congratulations to Hanyang! |
| 2025/01 - I am excited to announce that Our paper about In-Context Learning for Sim-to-Real System Identifications got accepted by IEEE Robotics and Automation Letters (RA-L), 2025! |
| 2024/06 - I am joining Esperanto Technologies as a Machine Learning Engineer Intern, working on open-source VLMs in Robotics and Robot Foundation Models. |
| 2023/10 - Our paper about using LLMs+Robotics+Tool Use is online now! Also check the twitter post for interesting demos and join the discussion! |
| 2023/08 - Our paper about closing the sim-to-real gap thourgh causal discovery got accepted by CoRL 2023 for a poster presentation, congratulations to Peide! |
| 2023/08 - Our paper about continual vision-based RL got accepted by CoRL 2023 for an oral presentation, congratulations to Shiqi and Mengdi! |
Publications
|
IEEE Robotics and Automation Letters (RA-L), 2025 * indicates equal contribution. Abridged in AAAI 2025 Workshop on Multi-Agent AI in the Real World Workshop.(oral presentation) [paper] [webpage] |
|
IEEE International Conference on Robotics and Automation (ICRA), 2025 Abridged in AAAI 2025 Workshop on Multi-Agent AI in the Real World Workshop.(oral presentation) [paper] |
|
arxiv, under review * indicates equal contribution. Abridged in CoRL 2023 Workshop on Language and Robot Learning. [paper] [webpage] |
|
Conference on Robot Learning (CoRL), 2023. (oral, 6.6%) * indicates equal contribution. Abridged in RSS 2023 Workshop on Symmetries in Robot Learning. [paper] [webpage] |
|
Conference on Robot Learning (CoRL), 2023. * indicates equal contribution. Abridged in IROS 2023 Workshop on Causality for Robotics: Answering the Question of Why. [paper] [webpage] |
Teaching
| Course Assistant of 24-767 Modern Control: Theory and Design, Carnegie Mellon University, Fall 2023 |
| Course Assistant of 24-784 Trustworthy AI Autonomy, Carnegie Mellon University, Spring 2024 |
Service
| Conference Reviewer: ICRA (2025,2026), ICLR 2026, CVPR 2026 |
| Journal Reviewer: RA-L (2024,2025,2026) |
Projects
|
16-831: Intro to Robot Learning(by Deepak Pathak) [paper] |
|
16-886: Models & Algorithms for Interactive Robotics(by Andrea Bajcsy) |
|
|